

Pilha elétrica do equipamento inteligente do conjunto do bloco da bateria que prende com correias a máquina
1. Exigências de projeto da pilha elétrica que prendem com correias a máquina:
1.1. O equipamento é baseado nas exigências de projeto do processo da bateria que prende com correias a máquina, e a bateria que a máquina de colocação de correias automática inteligente é fabricada baseou no projeto da indústria 4,0. A linha de produção inclui: mecanismo de alimentação, manipulador de alimentação, empilhando e posicionando a estação, empacotando a posição, a posição de pulverização, e a linha de descarregamento
1.3. Condições do uso:
1.3.1 condições da fonte de alimentação: fonte de alimentação principal: 220V±15%
ar 1.3.2 comprimido: ≥ 0.5mpa, 10L/30Min
1.3.3 temperaturas ambientais: 0℃ ~ 40℃.
humidade relativa 1.3.4: 10 ~ 60%RH
1.4. Exigências de produção:
1.4.1 exigências da aparência:
aparência uniforme de 1.4.1.1, nenhuma deformação;
1.4.1.2 nenhum furo de pino, marca do fluxo, ou outros defeitos;
1.4.2 exigências do tamanho:
1.4.2.1. Largura 35-100mm do produto.
comprimento do produto de 1.4.2.2: 50-150mm
espessura de parede do produto de 1.4.2.3: 3.8-12mm
1.4.3 códigos de barras da bateria
1.4.3.1. Na parte dianteira, use o laser código impresso do qr ou cole o código de barras
1.5. Exigências de desempenho da bateria que prende com correias a máquina:
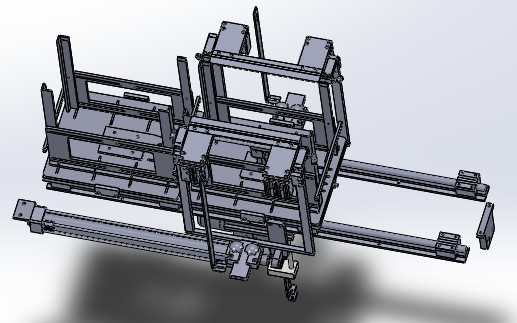
As exigências ser encontrado sob a produção normal condicionam; O mecanismo de alimentação, posicionando o mecanismo, varre o mecanismo, a operação do mecanismo obrigatório, do mecanismo do manipulador, a estável e a segura, a simples; Todas as peças moventes devem ter o mecanismo razoável, seguro, fácil de operar da lubrificação.
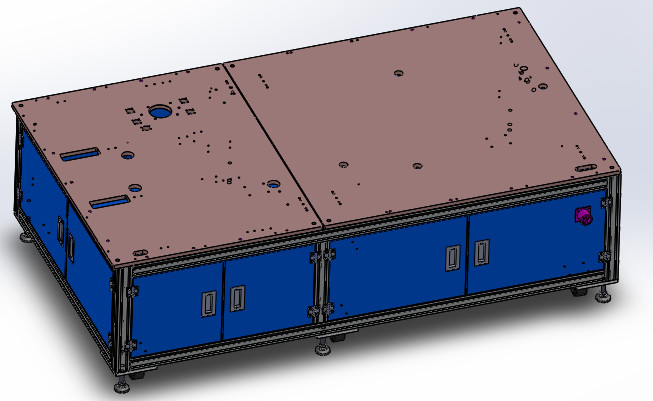
diagrama 1,5 esquemático do equipamento
tamanho da ocupação do equipamento 1.5.1 (unidade: milímetro): 2300*1300*1500 (comprimento * largura * altura)
2. Componentes principais da pilha elétrica que prendem com correias a máquina:
2,1, a cremalheira
2.2.1 o sistema do quadro são montados com perfis 30X60 e as peças de chapa metálica A3 de alumínio.
2.2. Estação da carga do material do prato
2.2.1 exigências de projeto
o poder de alimentação de 2.2.1.1 é conduzido pelo cilindro e por duas caixas de alimentação. Está posicionando defletores sobre os lados esquerdos e direitos, mecanismo de levantamento,
Um lado é equipado com o interruptor fotoelétrico da detecção
parâmetros de processo de 2.2.1.2: a largura de posicionamento pode ser ajustada de acordo com o tamanho da bateria. O nível de alimentação manual é aproximadamente três estações, e o manipulador intermediário toma o nível de alimentação
configuração de equipamento de 2.2.2 canos principais
| O número de série | Composição do sistema | A configuração de sistema | O número de |
| 1 | Sistema de transferência | cilindro | 1 |
| Curso escorregadiço | 2 | ||
| 2 |
Sistema de posicionamento (GPS)
|
Bloco de posicionamento do artigo | 4 |
|
Parte feita à máquina
|
1 | ||
| escaninho | 2 | ||
| Plataforma da colheita | 1 | ||
| 3 | 升 o sistema do elevador | Motor de levantamento | 1 |
| Grupo do parafuso de levantamento | 1 |
função 2.2.3: põe manualmente a bateria da pilha do todo de materiais do disco sobre a caixa material, o interruptor fotoelétrico da detecção detecta que o cilindro do material está transferido ao lugar médio e espera o manipulador de alimentação para pegarar o material, e as duas caixas de alimentação circulam a alimentação
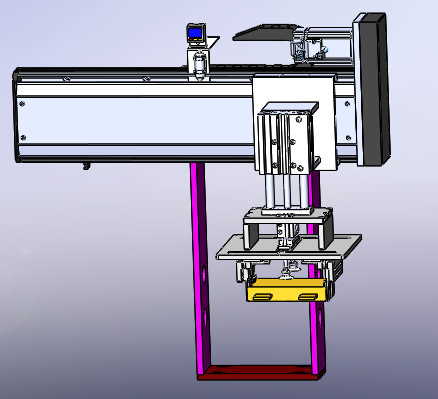
manipulador de alimentação de 2,3 baterias
2.3.2. Peças principais do equipamento
2.3.2.1. Mão de alimentação da bateria: é composta do servo motor, do módulo do parafuso movimentador, do cilindro do interruptor de proximidade, do levantamento, do grupo da placa da sução, etc. A estrutura é simples e prática.
2.3.2.1 .1: o movimento do grupo do otário é controlado pelo servo motor do módulo do parafuso para o posicionamento exato. Bateria do interruptor de proximidade disponível.
2.3.2.1 .2: o workpiece é conveniente, contínuo, estável e seguro.
função 2,4: tire a bateria na bandeja ao mecanismo de transferência da bateria e na bandeja vazia ao mecanismo vazio da coleção da bandeja
mecanismo de transferência de 2,4 baterias
24.1.1. Mecanismo da transmissão da bateria: este mecanismo é composto principalmente do motor de piso, da correia, do suporte, posicionando o cilindro, o interruptor de proximidade, etc.
mecanismo do poder de 2.4.2.1: velocidade ajustável.
2.4.2.2. A bateria é assegurada sem dano à bateria com do posicionamento do trabalho feito com ferramentas
a posição de 2.4.2.3 de posicionar o trabalho feito com ferramentas e a bateria pode facilmente ser ajustada, com posicionamento do ≤± 0.1mm da precisão
mecanismo de tensão da correia da correia de 2.4.2.4
2.4.2.5 baseia, o mecanismo é composto principalmente da placa de base e posicionar o pino, posicionando o pino que posiciona, assegura a estabilidade e a confiança, operação simples.
função 2.4.3: transfira a bateria do manipulador de alimentação à posição e espere o manipulador de medição da resistência da tensão para pegarar o material
2.5.1.1. Mecanismo da exploração: este mecanismo é composto principalmente da arma do suporte, da varredura, etc.
o ângulo da altura do suporte de 2.5.2.1 pode ser ajustado arbitrariamente
função 2.5.3: faça a varredura do código do qr na superfície da bateria para recolher os dados originais da bateria e para transmiti-los ao sistema informático.
2.6.1.1 o dispositivo é composto principalmente do suporte, cilindro de levantamento, ponta de prova fotoelétrica do sensor, obstrui e assim por diante.
2.6.2.1 o suporte pode ser ajustado arbitrariamente de acordo com o tamanho da bateria
função 2.6.3: empilhe e posicione a pilha.
2.7.1.1. Mecanismo da rotação: este mecanismo é composto principalmente do motor de piso, da correia, do suporte, posicionando o cilindro, o interruptor de proximidade, etc.
fita de 2.7.2.1 que coloca o mecanismo: velocidade ajustável,
2.7.2.2. A bateria é assegurada sem dano à bateria com do posicionamento do trabalho feito com ferramentas
2.7.2.3. Posicionar o trabalho feito com ferramentas e a bateria pode ser ajustado convenientemente, com posicionamento do ≤± 0.1mm da precisão
mecanismo de tensão da correia da correia de 2.7.2.4
2.7.2.5 baseia, o mecanismo é composto principalmente da placa de base e posicionar o pino, posicionando o pino que posiciona, assegura a estabilidade e a confiança, operação simples.
função 2.7.3: grave junto as pilhas elétricas tomadas do manipulador horizontal
manipulador de alimentação de 2.8.1.1: este mecanismo é composto principalmente do suporte, do cilindro de levantamento, do módulo da haste do parafuso, do disco da sução, da haste de regulamento, etc.
2.8.2.1 o suporte pode ser ajustado arbitrariamente de acordo com o tamanho da bateria
função 2.8.3: tome a bateria do mecanismo de transferência da pilha ao conjunto de posicionamento de colocação de correias do gabarito
2.9.1.1. Codifique o mecanismo da exploração: este mecanismo é composto principalmente do suporte, da arma do código, etc.
o ângulo da altura do suporte de 2.9.2.1 pode ser ajustado arbitrariamente
função 2.9.3: de acordo com os tipos da bateria classificados pelo grupo da análise de dados do sistema informático, os códigos diferentes são pulverizados na superfície da bateria.
2.10.1.1. Mecanismo da transmissão da bateria: este mecanismo é composto principalmente do motor de piso, da correia, do suporte, posicionando o cilindro, o interruptor de proximidade, etc.
mecanismo do poder de 2.10.2.1: velocidade ajustável,
2.10.2.2. Nenhum dano à bateria é garantido com do posicionamento do trabalho feito com ferramentas
2.10.2.3. Posicionar ferramentas e baterias pode facilmente ser ajustado, com posicionamento do ≤± 0.1mm da precisão
mecanismo de tensão da correia da correia de 2.10.2.4
2.10.2.5 baseia, o mecanismo é composto principalmente da placa de base e posicionar o pino, posicionando o pino que posiciona, assegura a estabilidade e a confiança, operação simples.
função 2.10.3: a bateria tomada do manipulador horizontal está esperando o código a ser pulverizado e entregado ao nível material do robô
1. Promessa nova do equipamento
Nossa empresa garante que os bens fornecidos aos clientes são equipamento brandnew, completo e não utilizado.
2. Compromisso da confidencialidade
Nossa empresa promete que sem a autorização escrita de nenhum partido, dos desenhos relativos do outro partido, da informação técnica, dos segredos da informação do negócio e de outros setor e de segredos técnicos não deve ser escapado aos terceiros em nenhuma maneira.
3. Compromisso do serviço pós-venda
(1) dois meses da data da expedição do equipamento, o partido B é responsável para falhas não-humanas em uma garantia oportuna e livre dentro de um ano (quando o equipamento é defeituoso, o pessoal de serviço pós-venda responderá dentro de 2 horas após ter recebido a notificação. De acordo com a situação, os pessoais devem ser no lugar dentro de 48 horas. Não mais tarde de 60 horas, para assegurar a continuidade da produção pelo comprador;
(2) após o equipamento passou o período de garantia, se há um problema, os dois partidos comunicam-se e tratam-se ele. Caso necessário, os pessoais pós-vendas serão enviados para repará-lo, e somente o custo será carregado. Zh
(3) durante o período de garantia estipulado no contrato e no acordo técnico assinados pelos dois partidos, a empresa fornecerá uma garantia para os problemas da qualidade que não são causados por dano humano durante o uso normal de nossos produtos.













